

Автор: Калугина Ольга Сергеевна
Руководитель: Гришин Алексей Валерьянович
Уральская Государственная Архитектурно-Художественная Академия.
Комментарий:
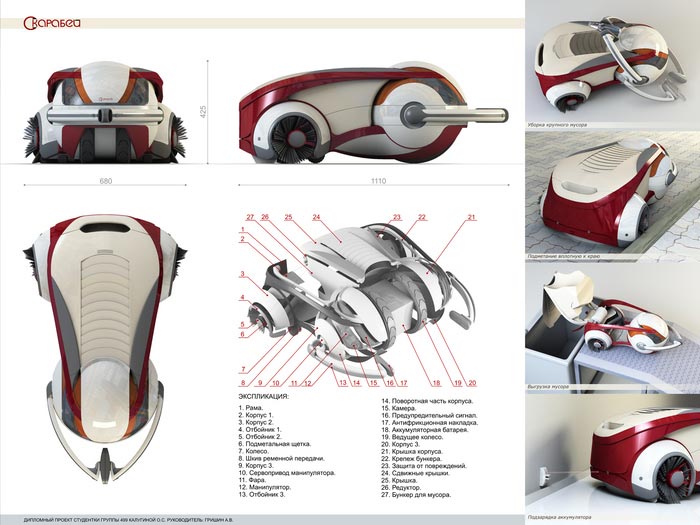
Основное предназначение робота - уборка уличных территорий торговых центров, но область применения может также включать в себя территории принадлежащие театрам, кинотеатрам, гостиницам и другим общественным учреждениям. Цель разработки - робот, проводящий уборку уличных территорий, способный стать качественной альтернативой ручному труду уборщика.
Данный проект является инновационной разработкой, поскольку не имеет прямых аналогов. На мировом рынке представлено большое разнообразие роботов - пылесосов, существуют также моющие роботы - пылесосы. Разрабатываемый робот отличается расширенными функциональными возможностями, так основной его функцией является распознавание и сбор крупного мусора (бутылки, банки, сигаретные пачки и т. д.), которым изобилуют улицы мегаполисов.
Композиция формы построена на сочетании правильной геометрии и динамичной чувственной пластики. Четко выверенная радиальная геометрия придает форме сдержанность и надежность, характерную для робототехники. А свободная чувственная пластика <оживляет> композицию внося динамику и характерные бионические черты, подчеркивая образ жука.
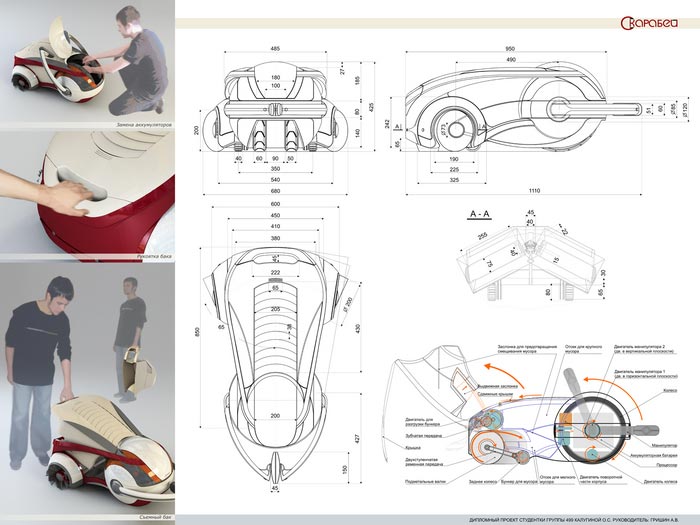
Движение робота осуществляется за счет двух передних колес, каждое из которых имеет свой привод. Сбор крупного мусора осуществляется манипуляторами с двумя степенями свободы. Манипуляторы крепятся к основе, которая способна поворачиваться на угол до 23 градусов, что увеличивает зону охвата манипуляторов. Для оценки убираемой территории и определения местонахождения мусора служат две веб камеры, а также датчики, определяющие расстояние до препятствий, расположенные на манипуляторах и в задней части робота. Уборка мелкого мусора осуществляется двумя диагональными подметальными валками, обеспечивающими подметание вплотную к краю. Подметаемый мусор перебрасывается в бункер, разделенный на зоны для крупного и мелкого мусора. Крупный мусор доставляется в бункер манипуляторами и падает через верхнее отверстие, закрытое пластинами, работающими по принципу жалюзи от небольшого сервопривода. Выгрузка мусора происходит автоматически. Бункер для мусора можно вытащить, чтобы помыть. Зарядка аккумулятора также происходит автоматически.
Данный проект является инновационной разработкой, поскольку не имеет прямых аналогов. На мировом рынке представлено большое разнообразие роботов - пылесосов, существуют также моющие роботы - пылесосы. Разрабатываемый робот отличается расширенными функциональными возможностями, так основной его функцией является распознавание и сбор крупного мусора (бутылки, банки, сигаретные пачки и т. д.), которым изобилуют улицы мегаполисов.
Композиция формы построена на сочетании правильной геометрии и динамичной чувственной пластики. Четко выверенная радиальная геометрия придает форме сдержанность и надежность, характерную для робототехники. А свободная чувственная пластика <оживляет> композицию внося динамику и характерные бионические черты, подчеркивая образ жука.
Движение робота осуществляется за счет двух передних колес, каждое из которых имеет свой привод. Сбор крупного мусора осуществляется манипуляторами с двумя степенями свободы. Манипуляторы крепятся к основе, которая способна поворачиваться на угол до 23 градусов, что увеличивает зону охвата манипуляторов. Для оценки убираемой территории и определения местонахождения мусора служат две веб камеры, а также датчики, определяющие расстояние до препятствий, расположенные на манипуляторах и в задней части робота. Уборка мелкого мусора осуществляется двумя диагональными подметальными валками, обеспечивающими подметание вплотную к краю. Подметаемый мусор перебрасывается в бункер, разделенный на зоны для крупного и мелкого мусора. Крупный мусор доставляется в бункер манипуляторами и падает через верхнее отверстие, закрытое пластинами, работающими по принципу жалюзи от небольшого сервопривода. Выгрузка мусора происходит автоматически. Бункер для мусора можно вытащить, чтобы помыть. Зарядка аккумулятора также происходит автоматически.